Этот «Краб» — самый маленький из когда-либо созданных шагающих роботов с дистанционным управлением
")
Действительно ли ваш крошечный робот настолько мал, если он больше ширины монеты? Группа ученых создала самого маленького в мире шагающего робота с дистанционным управлением, ширина которого составляет всего полмиллиметра (менее пятидесятой дюйма).
Чрезвычайно крошечные роботы имеют целый ряд потенциальных применений, от помощи в хирургических процедурах до ремонта оборудования в местах, где гаечный ключ не может поместиться. Чем меньше они становятся, тем в большем количестве сценариев их можно использовать.
Хотя этот бот еще не готов выйти в мир и заняться ремонтом, он действительно впечатляет.
Он выглядит и двигается как миниатюрный краб-пикито, форма которого, по словам исследователей, была выбрана по «творческой прихоти». На самом деле разработанные ими методы можно использовать для создания крошечных роботов практически любой требуемой формы.
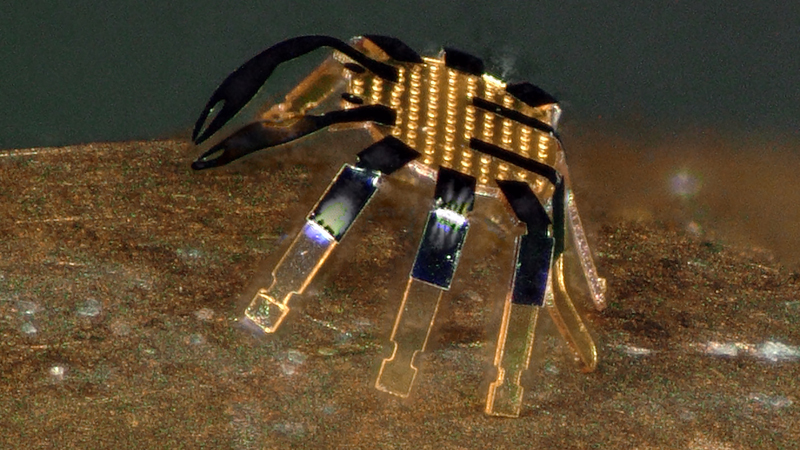 Робот управляется с помощью лазеров. (Северо-западный университет)
Робот управляется с помощью лазеров. (Северо-западный университет)
«Наша технология позволяет использовать различные способы контролируемого движения и может ходить со средней скоростью, равной половине длины тела в секунду», — говорит инженер-механик Юнган Хуан. , из Северо-Западного университета в Иллинойсе.
«Достичь этого в таких малых масштабах для наземных роботов очень сложно».
Технология, на которой основан робот, была первоначально разработана восемь лет назад. и мало чем отличается от всплывающей книги: части робота прикреплены к натянутой резиновой подложке, и когда материал расслабляется, устройство принимает свою форму.
Тщательно откалибровав базовые части, форму робота можно точно контролировать. Аналогичный подход используется с движущимися частями робота, которые изготовлены из сплава с памятью формы. Эти материалы переключаются между двумя разными формами в зависимости от того, нагреваются они или нет.
Лазеры, выступающие в роли пульта дистанционного управления, используются для нагрева определенных частей робота — по мере того, как эти части превращаются в разные форму, они продвигают краба вперед. Нет необходимости в источнике питания или двигателе, а тонкий стеклянный слой гарантирует, что компоненты возвращают свою первоначальную форму по мере охлаждения.
«Из-за того, что эти структуры такие крошечные, скорость охлаждения очень высока. быстро», — говорит материаловед Джон Роджерс из Северо-Западного университета. «На самом деле, уменьшение размеров этих роботов позволяет им бегать быстрее».
Направляя лазеры на разные участки робота-краба, исследователи могут задавать направление движения. Регулируя частоту лазерного сканирования, можно также изменить скорость движения робота.
Это следующий шаг в тенденции, согласно которой роботы со временем становятся все меньше и меньше, будь то чтобы сделать их более устойчивыми к внешним воздействиям, нацеливать лекарства для лечения болезней или создавать более крупные модульные структуры из более мелких частей.
Исследователи говорят, что у их нового процесса есть большой потенциал: они могут получить например, роботы поворачиваются и прыгают, используя те же приемы. Пока робот находится в пределах прямой видимости лазера, им можно управлять удаленно.
«Робототехника — захватывающая область исследований, а разработка микророботов – интересная тема для академических исследований. », — говорит Роджерс.
«Можно представить себе микророботов как агентов для ремонта или сборки небольших конструкций или машин в промышленности или как помощников хирурга для очистки закупоренных артерий, остановки внутреннего кровотечения или удаления раковых опухолей. и все это с использованием минимально инвазивных процедур».
Исследование опубликовано в журнале Science Robotics.












